基于 Velodyne 激光雷达数据采集的 ADAS 和无人机测试
Application Note
By Nina Kovač, application engineer, Dewesoft, Slovenia
测试和检查各种类型的驾驶辅助系统或自动驾驶系统是至关重要的,以确保车辆,乘客和行人的安全。Dewesoft DAQ 系统与 Dewesoft Velodyne 激光雷达模块提供了一个简单和灵活的解决方案,从所有类型的 Velodyne 激光雷达传感器获取数据,支持驱动系统的发展,提供最大的性能和安全。

Velodyne 传感器车辆技术解决方案,如用于自动驾驶系统,安装和测试的 Dewesoft 测试车辆
生产具有先进驾驶辅助系统(ADAS)和自动驾驶车辆(AVs)的电动汽车的公司需要进行以下测试:
▶ 自适应巡航控制(ACC)
▶ 前向碰撞警告(FCW)提醒驾驶员
▶ 避免碰撞
▶ 盲点检测
▶ 车道偏离警示
▶ 车道辅助系统
▶ 等等
为了进行这样的测试,汽车制造商需要高精度和快速响应的有效设备,以确保安全系统正常工作,在一般情况下,以及在危急情况下。
在这种情况下,激光雷达(光探测和测距)系统被用来探测物体和地图的距离。激光雷达可以实时计算这些距离。他们通过放电激光,测量光线击中物体或表面并反射回传感器所需要的时间。然后,他们对物体进行三维表示。
在许多情况下,激光雷达传感器与其他传感器如雷达和照相机一起使用。激光雷达数据通常需要与其他类型的传感器和数据源(模拟传感器、 CAN 总线等)的数据一起采集。制造商面临的挑战是同步和优化从不同数据源获得的所有数据的质量。
避免由于同步问题导致的不兼容或者甚至可能误导结果的最佳方法是使用 DAQ 解决方案,该方案可以提供所有数据源的同步采集。但是,这有可能吗?
多功能解决方案
我们已经开发了一个简单,但强大的 DewesoftX Velodyne 激光雷达模块,它满足测量需要的自动化车辆。它提供了一个灵活的测量解决方案,同步来自 Velodyne 激光雷达传感器的数据与其他数据在 DewesoftX 软件。
该 DewesoftX Velodyne 模块支持完整的 Velodyne 激光雷达家族。Velodyne 是一家来自美国加利福尼亚州的公司,生产用于各种应用的最先进的激光雷达传感器。单个或多个激光雷达设备通过以太网协议进行通信和连接。
Velodyne 激光雷达与其他 GNSS 设备(DS-IMU,DS-VGPS-HS,...)与 GPS PPS 信号同步,其中 GNSS 接收器是 NMEA GNSS 信息给 LIDAR 传感器的来源。为了获得用于 Velodyne 激光雷达的 PPS 同步,需要与 GNSS 设备进行物理连接,并在 DewesoftX DAQ 软件中进行适当的选择。
Velodyne Lidars 与 GPS PPS 信号同步,NMEA GNSS 信息也可以在 DewesoftX DAQ 软件中作为模块的标准导航通道使用。

全套 Velodyne 激光雷达产品系列由 DewesotX 数据采集软件支持
DS-IMU 惯性导航系统集成了多个传感器,例如:
▶ 加速度计,
▶ 磁力计,
▶ 压力传感器
▶ 全球导航卫星系统接收机
DS-IMU 设备也可以通过软同步设置连接。状态和激光雷达的转速设置可以直接在 DewesoftX 软件内完成。没有其他软件需要执行测量与激光雷达传感器。两个主要通道可从 Velodyne 激光雷达传感器-距离和强度点。点云的可视化是通过地图显示小部件处理的,其中开放的街道地图或卫星图像层与点云覆盖。所有的地图层都可以在 DewesoftX 内部下载,并且在离线模式下重用的测量字段上没有实际的互联网连接。与地图图层一样,选择地图也可以导入。
采用 DewesoftX 数据采集软件,数据采集系统结合了以下数据:
▶ 激光雷达传感器数据,
▶ 车辆 CAN 总线数据,
▶ 全球导航卫星系统的数据和定位,
▶ 制动距离计算,
▶ 驱动机器人数据
▶ 摄像机
在一个 DAQ 系统中耦合在一起的 DewesoftX 软件确保了数据同步、可视化、存储和数据比较的顺利进行。

图1. Dewesoft DS-CAN2连接到车辆的 OBD-II 端口进行数据采集。
测量设置
我们测量的目的是测试:
▶ 软件中激光雷达数据的响应性
▶ 与其他数据源(如 CAN、 GPS 和视频)的同步兼容性
▶ 用数据采集卡从 Velodyne Lidar、 DS-IMU2和 CAN 总线采集客车数据
为了更好地预览驾驶环境,摄像机被添加到数据采集系统中。这是一个非常有用的特点,分析数据文件时,可以免费添加到任何 Dewesoft DAQ 系统。
使用的数据采集设备
数据采集系统:
▶ Velodyne VLP-16激光雷达
▶ Dewesoft DS-IMU2设备 - 具有 GPS/GLonASS 支持和 RTK 选项的2厘米定位精度的惯性导航系统和全球导航卫星系统接收机
▶ 摄像机
▶ Dewesoft DS-CAN2 - 2通道 USB CAN 接口,用于车载 OBD-II 或 SAE J1939数据采集
▶ Dewesoft X 数据采集软件
▶ Velodyne 激光雷达模块(转速1200转)
设置图示意图
配置的系统在所有设备上实现了 GPS PPS 同步。DS-IMU2被放置在车顶上,而 Velodyne 激光雷达传感器被放置在引擎盖上。摄像机被安置在激光雷达传感器的顶部。Dewesoft DS-CAN2设备连接到车辆的 OBD-II 端口。
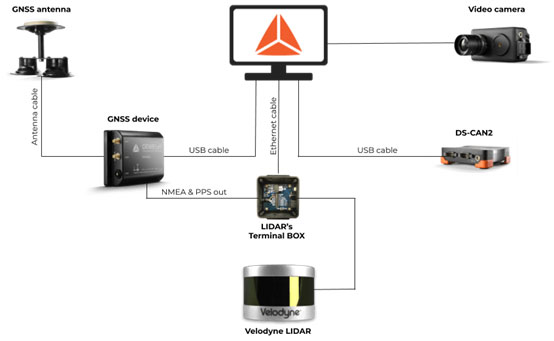
图2. Dewesoft 激光雷达设置——除了 GNSS 天线和 DS-CAN2之外,所有设备都需要供电。
DewesoftX 中的可视化显示为周围环境提供了一个很好的预览。对于激光雷达可视化,我们通常使用地图小部件。它提供了激光雷达数据的无缝可视化,其中着色代表激光强度和可视化线代表不同物体的激光点。两个地图小工具被用来显示:
▶ 左图: 定位和跟踪视图的 DS-IMU2设备与速度彩色规模
▶ 右图: 应用激光雷达强度着色的激光雷达点云可视化

图3. 测量屏幕—— MAP 控件用于激光雷达可视化。
激光雷达强度是指收集到的激光强度返回值(功率返回/功率发射) ,主要受到距离和目标反射率的影响,而激光雷达距离则被视为与默认激光雷达位置的实际距离。
激光雷达距离数据作为每个激光雷达点阵输出。它可以进一步用于给车辆反馈或分析车辆与周围物体的距离关系。用于交通场景的分类、目标的检测与识别等。
在应用中,我们使用了激光雷达传感器的1200rpm 转速。获得的强度和距离激光雷达数据可视化的结果是真正的响应内 DewesoftX 软件。DS-IMU2提供的激光雷达和 GNSS 数据同步到每个采集的样本,这证明了整体同步兼容性。
此外,我们使用了一个简单的网络摄像机链接到视频摄像机小部件,显示同步摄像机图像的驾驶环境。记录器小部件用于显示所选择的任何测量数据通道。在我们的案例中,我们使用了两台数字记录仪,显示了当前的驱动速度和我们的 GNSS 接收器可见的 GNSS 卫星数量。
所有的参数,也是那些没有应用在这个特殊的屏幕上,是保存在 Dewesoft 的数据文件。它们还可以添加到分析屏幕上,或者以各种格式导出,以便进一步进行开发计算和模拟。
总结
激光雷达传感器在自动驾驶汽车的开发和实际应用中发挥着重要作用。激光雷达传感器是重要的 ADAS 测试以及非汽车应用。使用激光雷达传感器的公司数量正在快速增加。这就是为什么激光雷达参数的获取和测试以及它们的整体同步是非常重要的。
Dewesoft 现在支持激光雷达测量与 Velodyne 激光雷达模块。在 DewesoftX 软件中集成和设置所有的传感器非常简单。我们花了大约15分钟的时间来连接和建立整个数据采集系统。
Dewesoft 提供了一个简单和灵活的解决方案,为不同类型的测量所有类型的车辆。来自各种传感器和数据源的数据可以在一个易于使用的设置中组合、同步和可视化。