车辆动力学测试
Written by Carsten Frederiksen
摘要
应用说明了车辆动力学测试中,Dewesoft 产品的有效解决方案,提供了对技术以及测试过程日益严格的需求答案。这些目标可通过匹配 Dewesoft 的硬件和软件来实现。此外,通过结合全局变量、测试案例和序列、显示和数学设置,可以构建一个自定义的测试环境来管理测试,在执行过程支持驾驶员并验证每个运行的测试。
引言
车辆动力学测试在新车的开发和评估中起着关键作用:
▶ 制定基准及目标
▶ 开发
▶ 验证及确认
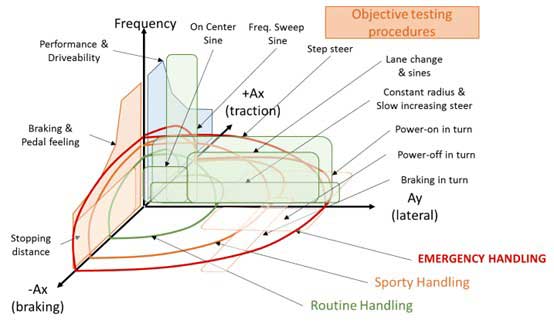
对于这些任务,有可靠和准确的测试结果非常重要,以避免在设计、开发或目标设定过程出错。应用 ISO 标准和合理的标准测试程序是实施可靠测试过程的良好做法。每个汽车制造商或系统供应商有自己的程序,这是技术记忆和规格探索的结果。ISO 标准是广泛接受的知识和建议的共同基础,这些知识和建议对取得良好的测试结果至关重要。他们还提供了一套“最小”的测试演习,以涵盖横向,纵向和交叉耦合(组合)动力学的车辆行为的主要方面,如上图所示。
每种测试类型,车辆动力学的工程师可得一系列性能指标,这些指标可以客观地描述车辆在不同测试条件下的行为。测试效率和可靠性的另一个关键因素是测试自动化和验证系统,这是本应用程序说明的对象。
|
典型的标准和定制测试 |
业绩评估项目 |
|
恒定半径(ISO 4138) |
转向不足/转向过度 |
|
缓慢增加转向(ECE13H) |
身体运动,尾部,倾斜 |
|
大转向(ISO7401) |
暂态响应 |
|
频率扫描正弦(ISO 7401) |
稳态回转 |
|
中心正弦(ISO 13674-1) |
中心感觉 |
|
一次开/关电源反应 |
敏捷 vs 稳定 |
|
变换车道(ISO 3888,VDA,ADAC,...) |
轨迹 |
|
ABD 或紧急制动(ISO 21994) |
路径偏差 |
|
低速处理(停车) |
停车距离 |
|
|
转向直径 |
测量设置
车辆动力学的典型测试,数据采集系统装置
▶ SIRIUS
▶ DEWE-43A
▶ 任何数据采集设备惯性导航系统
传感器
▶ DS-IMU2 ( CAN 口)
▶ 来自竞争对手品牌的 IMU (模拟输入)
▶ 光学速度和侧滑角传感器(模拟输入)
▶ 测量方向盘(模拟输入)
软件
▶ Dewesoft X
▶ DS-IMU2插件
▶ 数学频道
▶ 测序器
▶ 显示和数学设置
分析
技术要求
要获得可靠的客观指标,关键在于正确使用测试程序、高质量的传感器和测量系统、优秀的驾驶员、能够像机器人一样执行开环测试操作的命令,以及正确的信号处理和数据分析。下表概述了主要的测量问题,主要涉及传感器和测量系统的精度,以及需要进行适当信号处理的主要项目,其中考虑到滤波器、传感器位置效应和传感器——车辆——道路倾斜效应。
典型的测量问题
▶ 滑移角精度(噪声,漂移,传感器位置)
▶ 滚转和俯仰精度(漂移)
▶ 高度动态
▶ 同步
▶ 窄范围精度
▶ 宽范围精度
▶ GPS + IMU 分辨率和精度
一般规定(ISO 15037)
▶ 传感器和记录器的准确性,数据采集,滤波,后处理
▶ 传感器位置对滑移角和速度的补偿:
从测量点到参考点(COG)的平移
▶ 加速度传感器位置补偿:
从测量点到参考点(COG)的平移
▶ 重力效应(倾斜)的补偿:
由于车身滚动和节距的 g 分量
由于地面倾斜(滚动和节距)的 g 分量
这些项目以一些数据文件作为案例研究,这些文件是该公司在意大利国际公司的一个客户试验场,进行的 DS-IMU2与竞争对手的 IMU 基准测试的数据。
过滤和同步
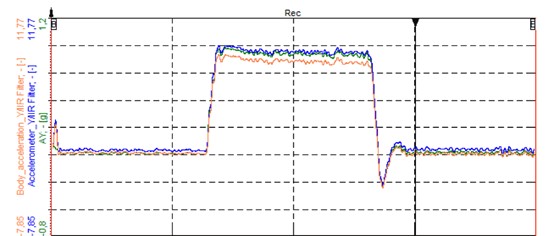
第一点是管理不同的数据源: AI 通道通过抗混叠滤波器,所以不可能直接比较竞争对手的 IMU 信号与 DSIMU2。为了获得与人工智能相同的增益和相移,可以对 DS-IMU2的数字信道应用类似的滤波器。结果显示如下通道“偏航率” ,这不需要任何进一步的补偿。然后,切换光学传感器通道,来补偿内部滤波器的延迟(在这种情况下是64ms)。
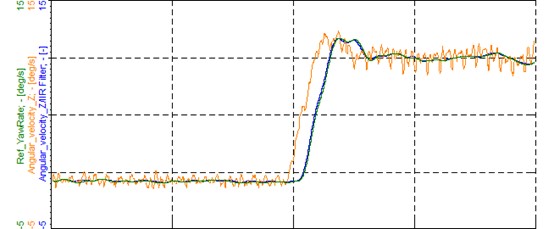
▶ 角速度_ Z: DS-IMU2“原样”的偏航速度
▶ Dewesoft 数学滤波器处理后的DS-IMU2的偏航速度
速度和侧滑角的平移
第二步是将滑移角从 DS-IMU2和光学传感器转换到相同的评价点。转换后,光学传感器的通道与其他人工智能的通道同步,特别是与 IMU 的输出同步。然后利用 IMU 的角速率,将滑移角和速度从传感器位置转换到评价点。DS-IMU2数据使用 DS-IMU2本身的角速率转换到同一评价点,无需彼此同步。结果如右图所示。
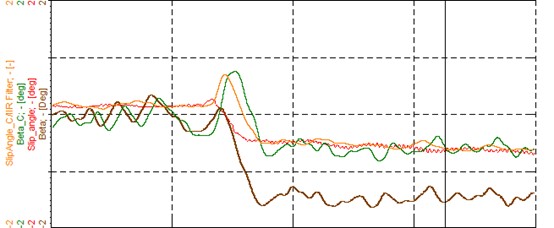
▶ 滑移角: 来自 DS-IMU2的侧滑角
▶ β _ c: 光学传感器的侧滑角随时间移动并补偿
▶ (传感器位置效应) ,即转换到评价点
▶ 滑动角 _ c/IIR滤波器: DS-IMU2补偿滤波的侧滑角
倾斜(重力)效应的补偿
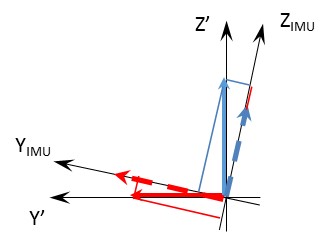
最后,考虑了整体倾斜和俯仰角对重力影响的补偿作用。一般来说,这个问题必须通过旋转矩阵来处理,旋转矩阵定义了 IMU 相对于地球坐标系或地面的方向。然而,如果我们简化模型,假设在一个平坦的水平平面上行驶,并且具有小的侧滚角和俯仰角(仅仅由于车身的运动) 。在横向动力的情况下,我们考虑与横摇角有关的水平面上的 Ay 补偿:
Ay_IMU = Ay_HOR*cos(Roll) + g*sin(Roll)
Az_IMU = -Ay_HOR*sin(Roll) + g*cos(Roll)
DS-IMU2提供了原始的“ Ay”和真实“ Ay” ,即在 IMU y 轴和水平面上观测到的横向加速度。否则,可以计算补偿:
ΔAy_g_roll = g * sin(Roll) ≈ g * Roll (小横摇角的一阶近似), 横摇为[rad]
在实际中,对于具有4度/g 侧倾刚度的车辆,横向加速度的补偿量大约为稳态横向加速度的7% 。注意,对于被动底盘(即曲线半径对侧的侧倾角) ,它总是负值,即水平面上的横向加速度小于惯性测量单元 y 轴上的加速度。这是因为加速度计可以感觉到横向加速度的一个分量加上 g 加速度的一个分量。注意,这些单位不同: DS-IMU2输出加速度是[ m/s2] ,而另一个 IMU 的输出是[ g ]。
测试自动化和验证
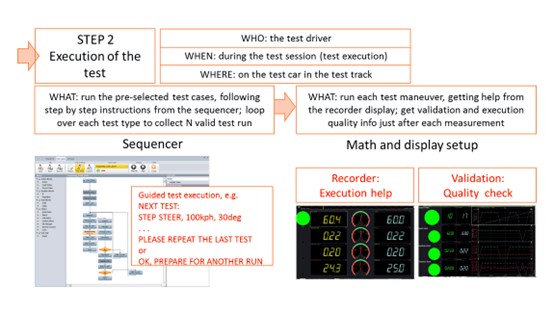
测试自动化和验证工具可在测试准备阶段和轨道测试操作的实际执行阶段提供几个关键的好处。测试部门的最终目标是实现一个更有效和更可靠的测试过程,这肯定会导致更好的测试结果和更少的努力。以下是车辆动力学测试工具的一些基本特性:
▶ 向驾驶员提供应该做什么,例如标准测试参数(速度、频率等)
▶ 向驾驶员提供他正在做的事情,例如实际速度和正常速度
▶ 执行计算以检查测试有效性
▶ 反馈驾驶员测试执行过程正确或错误的信息
▶ 反馈接下来要做什么给驾驶员,例如重复测试或切换到其他类型的测试
▶ 实时计算获得测试性能指标,例如停车距离、步骤响应等
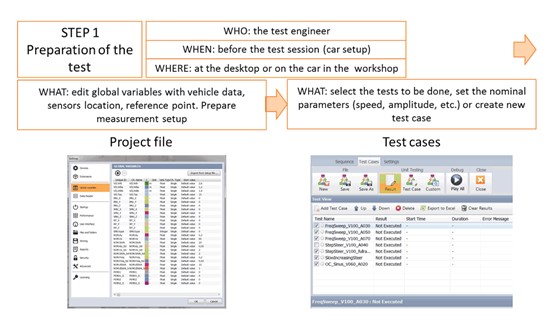
下面的图片描述了两个步骤,即准备和执行测试。
Dewesoft 的准备阶段主要取决于项目环境,其中定义了一些合适的全局变量,以存储与车辆性能和传感器设置有关的一些关键参数。
根据所需的测试协议,测试工程师可以启用或禁用许多预定义的测试用例。此外,还可以添加新的测试用例来覆盖新类型的测试。每个测试用例引用一个序列,该序列管理测试参数和计数器,并一步一步地向驾驶员提供操作指令。
本说明的第一部分,强调了一些基本的功能,可能有助于日常车辆动力学测试。这些功能是国际标准化组织测试标准对车辆动力学的主要技术要求:
▶ 使用 Dewesoft 滤波器和数学延迟通道来比较来自不同传感器和来源的数据(AI vs. CAN/plugin)
▶ 使用基本的数学公式来补偿速度传感器和加速度传感器的偏移效应(即位置效应)
▶ 处理有关身体和/或道路倾斜下,DSIMU2和数学通道,加速度的测量。
最后,引入了一个测试自动化解决方案,以便在执行预定义的测试会话期间,积极支持驾驶员,包括对每个测试运行的验证检查。这个解决方案是基于测试用例、序列和特定的数学设置的,并且有望提高车辆动力学测试的效率。