系统总览
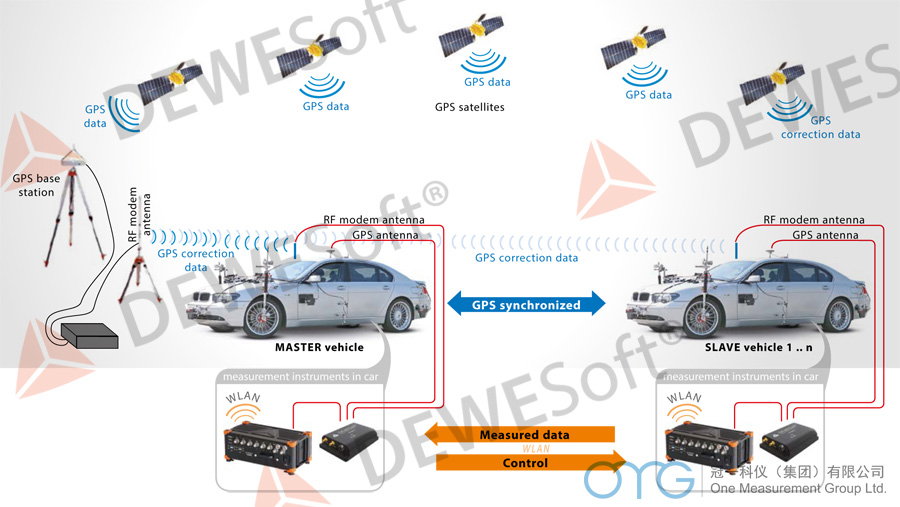
基于最新 GPS 的位置测量技术,提供了高精度、易使用的 ADAS 测试系统。 这得益于 GPS 传感器的 RTK (2cm 精度实时动态) 选项。固定安装的 GPS 基站将修正数据通过 RF 调制发送到信号覆盖范围内所有的DSIMU2系统中,由此保证所有系统的位置精度。
两辆或者多台车辆的数据必须提供非常精确的车辆位置以及相互之间的距离信息,和/或一个固定对象的此类信息,这是 ADAS 测试系统的基础。除此之外,DS-IMU2 还可提供车辆动力学测量的所有参数,包括侧滑角。
测试过程中,所有数据都实时发送到主系统进行计算以获取测量结果。这是DEWESoft®-OPT-NET 和 Polygon数学模块的标准功能。
坚固可靠的 WLAN 解决方案用来保证车载系统间的通讯,距离可达 1 km。理论上测试车辆并无数量限制 –仅取决于 WLAN 的带宽限制。
通过 GPS-PPS 同步技术,所有其他类型的数据也可以同步采集,例如模拟信号、计数器信号、视频、CAN、CCP/XCP、 FlexRay 等等。
应用ADAS 专业测试系统使用了 GeneSys IMU 光纤陀螺,除了包括搭配 IMU 和 GPS-RTK 的 ADAS 基础测试系统特性外,还可应用于长时间无法接收到GPS信号的场合,
如隧道等。这种组合能够获取高精度的车辆动力学参数,包括侧滑角。
|
主要特点
* 坚固可靠的袖珍 GPS , 附带惯导系统以及高动态AHRS (500 Hz)
* 融合陀螺、加速度计、磁力计、压力传感器和双天
线 RTK GNSS 接收机
* 高精度,易于使用 (完全集成于 DEWESoft® X 软件)
* 任意配置 SIRIUS® 模块
* 可用 DEWE-43, SIRIUS® 或者 DS-CAN2 扩展系统
* 多种其他同步数据源支持,例如:视频、 CAN、FlexRay、XCP、OBDII...
|
|
 |
避碰测试
实时更新相对距离、速度、加速度,探测车辆周边不可避障碍物的检测情况,,并且存储记录目标车辆所有避碰测试需要的其他信息。
| |
|
盲点探测测试
|
||
|
在汽车术语中,盲点定义为驾驶员无法看到的车外区域。对此类系统进行测试和验证可使用 DS-IMU2 ,设备可提供 2 cm 精度的位置信息及实时循迹的功能。
|
||
 |
自适应巡航控制系统测试
ACC 系统能够自动调节车辆速度以适应前方汽车或卡车的行驶速度。如遇头车减速,自适应巡航控制系统会自动配合。当交通恢复畅通时,系统可以自
动加速车辆。使用不同驾驶策略来测试系统是至关重要的,使用 DEWESoft® 系统的快速设置功能帮助研发,既可靠、又易用、省时。
| |
|
其他应用
|
||
|
* 所有车辆动力学测试
* 车道偏离预警
* 前方碰撞预警
* 车道变换预警 |
* 预碰撞
* 交叉路口辅助
* 追尾预警
* 驾驶员瞌睡预警系统测试 …
|
|