装载机声强自动测量
测试工程师 David Kohout,捷克共和国使用声强探头或叶片风速表对大量测量点进行人工测量既费时又无效。实现此类测量自动化的主要原因是实现了良好的重复性,节省测量的时间,改进测量结果分析。
另一方面,主要挑战是如何控制协作机器人。在 Doosan Bobcat 的自动化声强测量中,使用 Dewesoft DAQ 系统-Dewesoft x软件与声强插件。
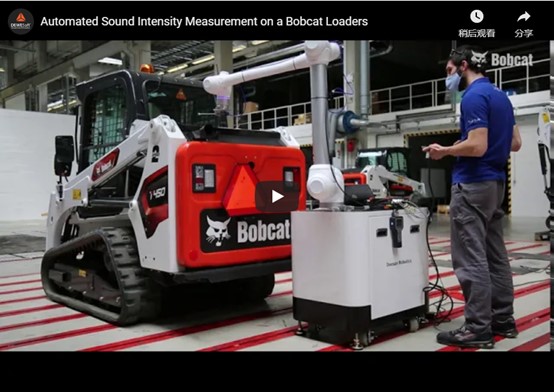
山猫装载机机械臂声强自动化测量
山猫公司

图1: 山猫装载机的空气流量测量
声强测量
声强与声压的物理量不同。人类的听觉对声压直接敏感,而声压又与声强有关。在消费音频电子产品中,声级差称为“强度”差,但声强是一个特定的量,不能被简单的麦克风感知。
声强级(SIL)是声强相对于参考值的级别(对数量)。它被称为 LI,表示为奈培、贝尔或分贝。
测量设置

用 Dewesoft 数据采集系统对 Bobcat 装载机进行声音测量
第二个应用是用叶片式风速计(Höntzch-ts26/16ge-mn40a/125/p0/ZG1)测量气流。输出模拟信号数据室温下保存。
协作机器人由3个模拟输入和1个模拟输出进行通讯控制。
数据采集系统:
- 数据采集系统,型号 SIRIUSi-8xACC-8xAO-8模拟通道 iepe/电压输入,8通道电压输出
- 数据采集系统,8xstg +-8模拟通道,8计数器通道
传感器:
- 声强计3599
- 12AB 声功率模块
- Höntzch 叶片风速计 -TS26/16GE-mn 40A/125/p0/ZG1
软件:
- Dewesoft X3 SP10数据采集软件
- 声强插件
测量描述
根据 iso9614-1规则,对网格的每个节点进行测量。这种方法比 iso9614-2规则扫描更耗时,但提供了更准确和详细的信息。
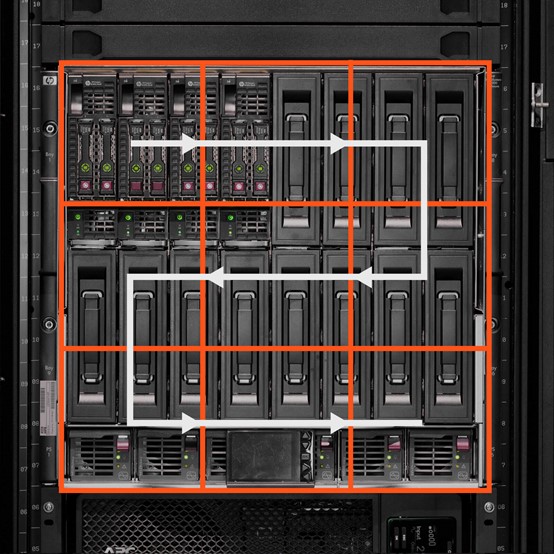
Dewesoft x 数据采集软件中基于 iso9614.1的声强探头定位
该通道的触发电平和滞后特性可提前定义并设置。上升电平超过阈值触发存储开始,下降电平超过阈值触发储存结束。时间间隔是指在一定模拟电平上的持续长度。端点轨迹有两种选择——单向或双向,见下图2。
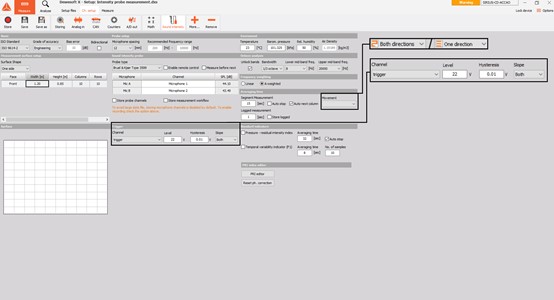
图2: Dewesoft 自动声强测量设置
十字风速计测量气流与声强测试一样,测量的气流靠近热交换器或其他可能倾斜的表面。因此,测量网格定义了3个角点。
这种设置允许创建任何倾斜平面。触发通道测量和初始化设置与声强测量相同。端点的空间坐标需重新计算转化成平面二维坐标系。端点的 x 和 y 坐标作为模拟信号从协作机器人发送到 Dewesoft系统。
测量结果
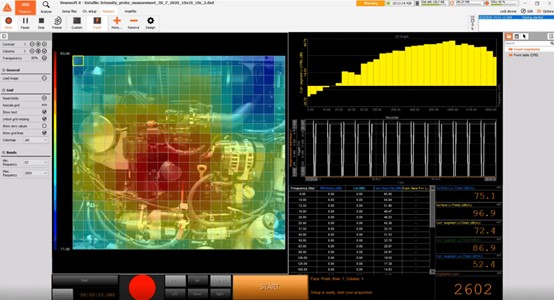
图3: 声强探头测量的结果
分析声学结果,是从整体声压级谱中识别并滤波分析出最重要的波段。
如果图像与测量表面对应起来,声学结果可以识别每个噪声源(发动机、轴流风扇、液压泵等)。该方法目的是对比不同设计变更下的准确性和重复性。

图3-Dewesoft 的气流量测量 x-数据输出至 Excel 范本
气流测量结果导出到 Excel 模板。这种数据处理方式提供了测量后报告的高效自动化。使用生成的报告模板的工作流如图3所示。
这个案例采集的是设备热交换器附近的气流量。风速均值与环境温度、发动机转速和风扇轴上安装的转速传感器信号同步。
冷却系统特征值是通过流经换热器的平均流量。这个值与测量表面的平均流速,空气温度和空气密度有关。这个值是验证设备冷却系统 CFD 模拟器所必需的。该速度场也可用于快速比较机器冷却包的不同结构效果。