下载PDF
人形机器人传感器
应用概述
人形机器人正在迅速发展以协助和支持人类活动,为重大技术进步铺平了道路,这些进步在广泛的领域开辟了广泛的应用,从为临床任务提供帮助和为患者提供支持,到为各种应用自动执行重复和潜在危险的任务,从而提高工业运营的效率。这一进步的核心是集成力和扭矩传感器,这些传感器利用应变计技术,使机器人能够像人类一样优雅地精确移动。工程师、设计师和传感器制造商之间的协作对于克服挑战至关重要,这些挑战包括管理集成复杂性、适应环境变化、动态响应性、成本效益、最大限度地减少机械串扰、确保耐用性以及符合安全标准。
FUTEK 的工程团队在设计和定制力和扭矩传感器方面拥有深厚的专业知识,以克服和应对人形机器人创新的挑战。探索如何将 FUTEK 在力和扭矩传感器方面的专业知识用于主要的人形机器人系统。
1)QLA414/QLA424 Nano微型力传感器 – 指尖,直列指关节
人形机器人上的 Fingertip 和 Inline 指关节系统执行需要精细操作或与环境交互的任务。FUTEK 的 QLA414/424 Nano力传感器采用通孔设计,作为整体结构安装在轴上,此外,前端安装规定使其能够测量拉伸和压缩,对于小至 4mm x 5mm 且重量仅为 0.5g 的传感器来说,这是一个行业突破,克服了与现有机器人硬件和控制系统集成复杂性的挑战,同时保持了紧凑和轻便的设计。此外,Nano 传感器的弯曲设计提供了无与伦比的 98kHz 高固有频率,提供了超快的响应(比大型/同类解决方案快 30-40 倍)。Nano 力传感器也是机器人触觉传感应用的合适选择。
2) LCM 系列微型柱状拉压力传感器 – 胫骨张力/压缩力
人形机器人的胫骨系统包括放置在机器人胫骨(小腿部分)中的传感器,这些传感器可以测量机器人在移动、站立或与环境互动时腿部承受的力以及从哪个方向。FUTEK 的 LCM 系列拉压力传感器是克服这些挑战的绝佳解决方案,因为它们能够在需要高精度传感器且占地面积小的应用中测量拉伸和压缩力。缝焊不锈钢机身具有出色的强度和耐腐蚀性,除了承受其他恶劣的环境条件外,还可以增强对物理损坏的保护。某些型号的防护等级为 IP67,可浸入 1 米深的水中至少 30 分钟。此功能使传感器成为"耐候性"或"户外级",并开辟了应用可能性,因为它允许在潮湿、雨天或高度潮湿的条件下进行户外使用。
一些力测量应用可能需要 LCB200 杆式力传感器,该传感器专为涉及直列执行器或带外螺纹/内螺纹的液压千斤顶的应用而设计。LCB200 的最大优点是它具有外螺纹/内螺纹,可以用更少的适配器和组件来扩展执行器。
3) 6 轴力传感器 – 手腕,躯干与下半身的连接接头
人形机器人躯干关节中的传感器使扭动、弯曲和转动等动作平稳,确保机器人能够承受自身的重量和运动过程中遇到的力。人形机器人上的手腕系统提高了灵活性和操作范围,以满足所需的不同优化任务。FUTEK 的 6 个自由度传感器旨在精确测量施加在一个方向上的力和扭矩,而施加在其他方向上的力或力矩的串扰干扰很小或没有。此功能对于达到使用手臂-躯干系统执行的不同操作任务所需的精度和灵巧性水平尤为重要。
FUTEK 6 轴力传感器的优点:
• 轻巧、外形小;
• 通孔设计,可以供电缆和配件通过(如适用);
• 可以集成高分辨率嵌入式电子设备,使 FUTEK 6轴力传感器成为模块化;
• 支持客户定制,以满足某些刚度、重量、过载保护或几何尺寸要求;
• 可定制冗余和故障检测;
• 可定制以实现低功耗;
• 低串扰,补偿矩阵可最大限度地减少串扰;
• 高零点和温度稳定性。
4) LLB系列按钮型压力传感器 – 脚底
人形机器人的脚部系统配备了集成的称重传感器和力传感器,不仅可以支撑机器人的重量,还可以感知施加在地面上的外力。这种力反馈提供了有关足部姿势和外力的关键信息,从而能够精确测量机器人的重心并提高其自主性。通过准确评估这些力,机器人可以保持平衡并适应不同的条件,从而最大限度地提高其操作独立性。FUTEK 的 LLB 系列薄型微型按钮压力传感器能够测量小尺寸的压缩力。LLB 系列采用高度定制的应变元件,旨在允许在有源传感器元件周围进行更多应变测量,从而减少离轴负载的再现性误差,以及内部嵌入的零点平衡和热补偿,从而实现出色的传感器可靠性、准确性和性能。它提供非常高的固有频率,从而提供快速响应时间,有利于在动态应用中提高精度并缩短循环时间,例如人形机器人的脚底。
5)应变波齿轮扭矩传感器 – 肩部、膝盖、肘部
应变波齿轮扭矩传感器安装在机器人的肩膀、膝盖和肘部以及安装点之间,可测量每个关节运动期间的扭矩输出。类人机器人应用的好处是:
• 通过更快的加速和更快的稳定时间,降低机械臂的惯性并提高动态性能;
• 在单级中提供高减速比和非常低的背隙;
• 增加有效载荷能力并降低电力要求;
• 重量轻、外形扁平、精度高,可实现闭环反馈;
• 几何形状和设计高度灵活。
FUTEK 的工程团队在设计和定制力和扭矩传感器方面拥有深厚的专业知识,以克服和应对人形机器人创新的挑战。探索如何将 FUTEK 在力和扭矩传感器方面的专业知识用于主要的人形机器人系统。
1)QLA414/QLA424 Nano微型力传感器 – 指尖,直列指关节
人形机器人上的 Fingertip 和 Inline 指关节系统执行需要精细操作或与环境交互的任务。FUTEK 的 QLA414/424 Nano力传感器采用通孔设计,作为整体结构安装在轴上,此外,前端安装规定使其能够测量拉伸和压缩,对于小至 4mm x 5mm 且重量仅为 0.5g 的传感器来说,这是一个行业突破,克服了与现有机器人硬件和控制系统集成复杂性的挑战,同时保持了紧凑和轻便的设计。此外,Nano 传感器的弯曲设计提供了无与伦比的 98kHz 高固有频率,提供了超快的响应(比大型/同类解决方案快 30-40 倍)。Nano 力传感器也是机器人触觉传感应用的合适选择。
2) LCM 系列微型柱状拉压力传感器 – 胫骨张力/压缩力
人形机器人的胫骨系统包括放置在机器人胫骨(小腿部分)中的传感器,这些传感器可以测量机器人在移动、站立或与环境互动时腿部承受的力以及从哪个方向。FUTEK 的 LCM 系列拉压力传感器是克服这些挑战的绝佳解决方案,因为它们能够在需要高精度传感器且占地面积小的应用中测量拉伸和压缩力。缝焊不锈钢机身具有出色的强度和耐腐蚀性,除了承受其他恶劣的环境条件外,还可以增强对物理损坏的保护。某些型号的防护等级为 IP67,可浸入 1 米深的水中至少 30 分钟。此功能使传感器成为"耐候性"或"户外级",并开辟了应用可能性,因为它允许在潮湿、雨天或高度潮湿的条件下进行户外使用。
一些力测量应用可能需要 LCB200 杆式力传感器,该传感器专为涉及直列执行器或带外螺纹/内螺纹的液压千斤顶的应用而设计。LCB200 的最大优点是它具有外螺纹/内螺纹,可以用更少的适配器和组件来扩展执行器。
3) 6 轴力传感器 – 手腕,躯干与下半身的连接接头
人形机器人躯干关节中的传感器使扭动、弯曲和转动等动作平稳,确保机器人能够承受自身的重量和运动过程中遇到的力。人形机器人上的手腕系统提高了灵活性和操作范围,以满足所需的不同优化任务。FUTEK 的 6 个自由度传感器旨在精确测量施加在一个方向上的力和扭矩,而施加在其他方向上的力或力矩的串扰干扰很小或没有。此功能对于达到使用手臂-躯干系统执行的不同操作任务所需的精度和灵巧性水平尤为重要。
FUTEK 6 轴力传感器的优点:
• 轻巧、外形小;
• 通孔设计,可以供电缆和配件通过(如适用);
• 可以集成高分辨率嵌入式电子设备,使 FUTEK 6轴力传感器成为模块化;
• 支持客户定制,以满足某些刚度、重量、过载保护或几何尺寸要求;
• 可定制冗余和故障检测;
• 可定制以实现低功耗;
• 低串扰,补偿矩阵可最大限度地减少串扰;
• 高零点和温度稳定性。
4) LLB系列按钮型压力传感器 – 脚底
人形机器人的脚部系统配备了集成的称重传感器和力传感器,不仅可以支撑机器人的重量,还可以感知施加在地面上的外力。这种力反馈提供了有关足部姿势和外力的关键信息,从而能够精确测量机器人的重心并提高其自主性。通过准确评估这些力,机器人可以保持平衡并适应不同的条件,从而最大限度地提高其操作独立性。FUTEK 的 LLB 系列薄型微型按钮压力传感器能够测量小尺寸的压缩力。LLB 系列采用高度定制的应变元件,旨在允许在有源传感器元件周围进行更多应变测量,从而减少离轴负载的再现性误差,以及内部嵌入的零点平衡和热补偿,从而实现出色的传感器可靠性、准确性和性能。它提供非常高的固有频率,从而提供快速响应时间,有利于在动态应用中提高精度并缩短循环时间,例如人形机器人的脚底。
5)应变波齿轮扭矩传感器 – 肩部、膝盖、肘部
应变波齿轮扭矩传感器安装在机器人的肩膀、膝盖和肘部以及安装点之间,可测量每个关节运动期间的扭矩输出。类人机器人应用的好处是:
• 通过更快的加速和更快的稳定时间,降低机械臂的惯性并提高动态性能;
• 在单级中提供高减速比和非常低的背隙;
• 增加有效载荷能力并降低电力要求;
• 重量轻、外形扁平、精度高,可实现闭环反馈;
• 几何形状和设计高度灵活。
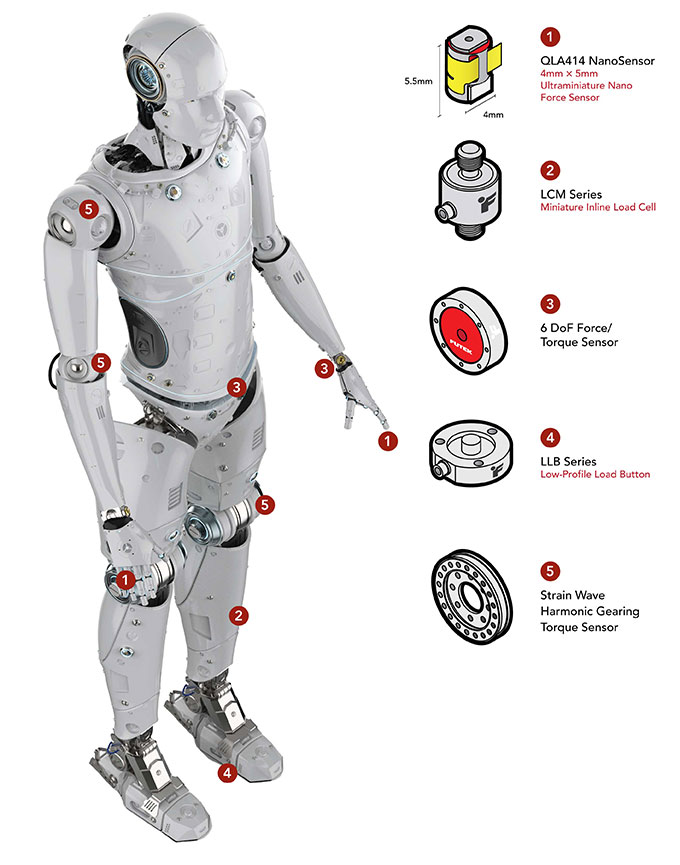
使用说明:
|
* 指尖位置: QLA414/QLA424 Nano微型力传感器
* 胫骨位置:LCM系列微型力传感器
* 手腕、驱赶、下半身关节: 6轴力传感器
* 脚底位置: LLB 系列按钮型力传感器
* 肩部、膝盖、肘部位置: 应变波齿轮扭矩传感器
|
|
||||||||||||||||||||||||||||||||||||||







